| Citation: | Derecke Palmer. Exploiting Lateral Resolution of Near-Surface Seismic Refraction Methods. Journal of Earth Science, 2009, 20(3): 526-545. doi: 10.1007/s12583-009-0044-x

|
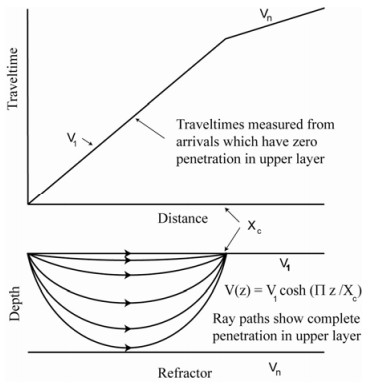
The 1D

| Aki, K., Richards, P. G., 2002. Quantitative Seismology. University Science Books, New York |
| Barton, P., Barker, N., 2003. Velocity Imaging by Tau-p Transformation of Refracted Seismic Traveltimes. Geophysical Prospecting, 51: 195–203 doi: 10.1046/j.1365-2478.2003.00365.x |
| Berry, M. J., 1971. Depth Uncertainties from Seismic First-Arrival Refraction Studies. Journal of Geophysical Research, 76(26): 6464–6468 doi: 10.1029/JB076i026p06464 |
| Červený, V., Ravindra, R., 1971. Theory of Seismic Head Waves. University of Toronto Press, Toronto |
| Chopra, S., Marfurt, K. J., 2007. Seismic Attributes for Prospect Identification and Reservoir Characterization. Geophysical Developments No. 11, SEG, Tulsa |
| de Franco, R., 2005. Multi-refractor Imaging with Stacked Refraction Convolution Section. Geophysical Prospecting, 53(3): 335–348 doi: 10.1111/j.1365-2478.2005.00478.x |
| Domzalski, W., 1956. Some Problems of Shallow Refraction Investigations. Geophysical Prospecting, 4(2): 140–166 doi: 10.1111/j.1365-2478.1956.tb01401.x |
| Drijkoningen, G. G., 2000. The Usefulness of Geophone Ground-Coupling Experiments to Seismic Data. Geophysics, 65(6): 1780–1787 doi: 10.1190/1.1444862 |
| Hagedoorn, J. G., 1955. Templates for Fitting Smooth Velocity Functions to Seismic Refraction and Reflection Data. Geophysical Prospecting, 3: 325–338 doi: 10.1111/j.1365-2478.1955.tb01379.x |
| Hagedoorn, J. G., 1959. The Plus-Minus Method of Interpret ing Seismic Refraction Sections. Geophysical Prospecting, 7(2): 158–182 doi: 10.1111/j.1365-2478.1959.tb01460.x |
| Hagiwara, T., Omote, S., 1939. Land Creep at Mt Tyausu-Yama (Determination of Slip Plane by Seismic Prospecting). Tokyo University Earthquake Research Institute Bulletin, 17: 118–137 http://repository.dl.itc.u-tokyo.ac.jp/dspace/bitstream/2261/10427/1/ji0171011.pdf |
| Hawkins, L. V., 1961. The Reciprocal Method of Routine Shallow Seismic Refraction Investigations. Geophysics, 26: 806–819 doi: 10.1190/1.1438961 |
| Healy, J. H., 1963. Crustal Structure along the Coast of California from Seismic-Refraction Measurements. Journal of Geophysical Research, 68(20): 5777–5787 doi: 10.1029/JZ068i020p05777 |
| Ivanov, J., Miller, R. D., Xia, J., et al., 2005a. The Inverse Problem of Refraction Travel Times, Part I: Types of Geophysical Nonuniqueness through Minimization. Pure and Applied Geophysics, 162(3): 447–459 doi: 10.1007/s00024-004-2615-1 |
| Ivanov, J., Miller, R. D., Xia, J., et al., 2005b. The Inverse Problem of Refraction Travel Times, Part II: Quantifying Refraction Nonuniqueness Using a Three-Layer Model. Pure and Applied Geophysics, 162(3): 461–477 doi: 10.1007/s00024-004-2616-0 |
| Lanz, E., Maurer, H., Green, A. G., 1998. Refraction Tomography over a Buried Waste Disposal Site. Geophysics, 63(4): 1414–1433 doi: 10.1190/1.1444443 |
| Menke, W., 1989. Geophysical Data Analysis: Discrete Inverse Theory. Academic Press, London |
| Merrick, N. P., Odins, J. A., Greenhalgh, S. A., 1978. A Blind Zone Solution to the Problem of Hidden Layers within a Sequence of Horizontal or Dipping Refractors. Geophysical Prospecting, 26: 703–721 doi: 10.1111/j.1365-2478.1978.tb01630.x |
| Nettleton, L. L., 1940. Geophysical Prospecting for Oil. Mcgraw-Hill Book Company, New York |
| Oldenburg, D. W., 1984. An Introduction to Linear Inverse Theory. Trans. IEEE Geoscience and Remote Sensing, GE-22(6): 665–674 |
| Palmer, D., 1980. The Generalized Reciprocal Method of Seismic Refraction Interpretation. Society of Exploration Geophysicists, 104 |
| Palmer, D., 1981. An Introduction to the Generalized Reciprocal Method of Seismic Refraction Interpretation. Geophysics, 46: 1508–1518 doi: 10.1190/1.1441157 |
| Palmer, D., 1986. Refraction Seismics: The Lateral Resolution of Structure and Seismic Velocity. Geophysical Press, London |
| Palmer, D., 1991. The Resolution of Narrow Low-Velocity Zones with the Generalized Reciprocal Method. Geophysical Prospecting, 39(8): 1031–1060 doi: 10.1111/j.1365-2478.1991.tb00358.x |
| Palmer, D., 1992. Is Forward Modeling as Efficacious as Minimum Variance for Refraction Inversion? Exploration Geophysics, 23: 261–266, 521 doi: 10.1071/EG992261 |
| Palmer, D., 2001a. Imaging Refractors with the Convolution Section. Geophysics, 66: 1582–1589 doi: 10.1190/1.1487103 |
| Palmer, D., 2001b. Resolving Refractor Ambiguities with Amplitudes. Geophysics, 66(5): 1590–1593 doi: 10.1190/1.1487104 |
| Palmer, D., 2001c. Measurement of Rock Fabric in Shallow Refraction Seismology. Exploration Geophysics, 32: 907–914 |
| Palmer, D., 2003. Application of Amplitudes in Shallow Seismic Refraction Inversion. 16th ASEG Conference and Exhibition, Adelaide (Abstract) |
| Palmer, D., 2006. Refraction Traveltime and Amplitude Corrections for Very Near-Surface Inhomogeneities. Geophysical Prospecting, 54(5): 589–604 doi: 10.1111/j.1365-2478.2006.00567.x |
| Palmer, D., 2008a. Non-Uniqueness in Near-Surface Refraction Inversion. In: Xu, Y. X., Xia, J. H., eds., Proceedings of the 3rd International Conference on Environmental and Engineering Geophysics, Wuhan, China. Science Press, Beijing. 42–54 |
| Palmer, D., 2008b. Is It Time to Re-engineer Geotechnical Seismic Refraction Methods? In: Xu, Y. X., Xia, J. H., eds., Proceedings of the 3rd International Conference on Environmental and Engineering Geophysics, Wuhan, China. Science Press, Beijing. 29–41 |
| Palmer, D., 2009. Integrating Short and Long Wavelength Time and Amplitude Statics. First Break (Preprint) |
| Palmer, D., Jones, L., 2005. A Simple Approach to Refraction Statics with the Generalized Reciprocal Method and the Refraction Convolution Section. Exploration Geophysics, 36(1): 18–25 doi: 10.1071/EG05018 |
| Palmer, D., Nikrouz, R., Spyrou, A., 2005. Statics Corrections for Shallow Seismic Refraction Data. Exploration Geophysics, 36: 7–17 doi: 10.1071/EG05007 |
| Palmer, D., Shadlow, J., 2008. Integrating Long and Short Wavelength Statics with the Generalized Reciprocal Method and the Refraction Convolution Section. Exploration Geophysics, 39: 139–147 doi: 10.1071/EG08019 |
| Ruijtenberg, P. A., Buchanan, R., Marke, P., 1992. Three-Dimensional Data Improve Reservoir Mapping. In: Sheriff, R. E., ed., Reservoir Geophysics. SEG, Tulsa. 122–130 |
| Schuster, G. T., Quintus-Bosz, A., 1993. Wavepath Eikonal Traveltime Inversion: Theory. Geophysics, 58: 1314–1323 doi: 10.1190/1.1443514 |
| Sjögren, B., 2000. A Brief Study of the Generalized Reciprocal Method and Some Limitations of the Method. Geophysical Prospecting, 487: 815–834 doi: 10.1046/j.1365-2478.2000.00223.x |
| Slichter, L. B., 1932. The Theory of the Interpretation of Seismic Travel-Time Curves in Horizontal Structures. Physics., 3: 273–295 doi: 10.1063/1.1745133 |
| Stefani, J. P., 1995. Turning-Ray Tomography. Geophysics, 60: 1917–1929 doi: 10.1190/1.1443923 |
| Treitel, S., Lines, L., 1988. Geophysical Examples of Inversion (with a Grain of Salt). The Leading Edge, 7(11): 32–35 doi: 10.1190/1.1439464 |
| Whiteley, R. J., 1986. Electrical and Seismic Response of Shallow Volcanogenic Massive Sulphide Ore Deposits: [Dissertation]. University of New South Wales, Sydney. 393 |
| Whiteley, R. J., Greenhalgh, S. A., 1979. Velocity Inversion and the Shallow Seismic Refraction Method. Geoexploration, 17: 125–141 doi: 10.1016/0016-7142(79)90036-X |
| Zhang, J., Toksöz, M. N., 1998. Nonlinear Refraction Traveltime Tomography. Geophysics, 63(5): 1726–1737 doi: 10.1190/1.1444468 |
| Zhu, X., Sixta, D. P., Andstman, B. G., 1992. Tomostatics: Turning-Ray Tomography + Static Corrections. The Leading Edge, 11(12): 15–23 doi: 10.1190/1.1436864 |
Figures(23) / Tables(1)
Copyright © 2013-2020 Journal of Earth Science 鄂ICP备15021562号-2
Tel: +86-27-67885075 Fax: +86-27-67885075 E-mail: xbb@cug.edu.cn
Address: Editorial Office of Journal, China University of Geosciences, Yujiashan, Wuhan, Hubei 430074, P. R. China
Supported by:
Beijing Renhe Information Technology Co. Ltd
E-mail:
info@rhhz.net



 DownLoad:
DownLoad: