2015, 26(4): 598-606.
doi: 10.1007/s12583-015-0572-5
Abstract:
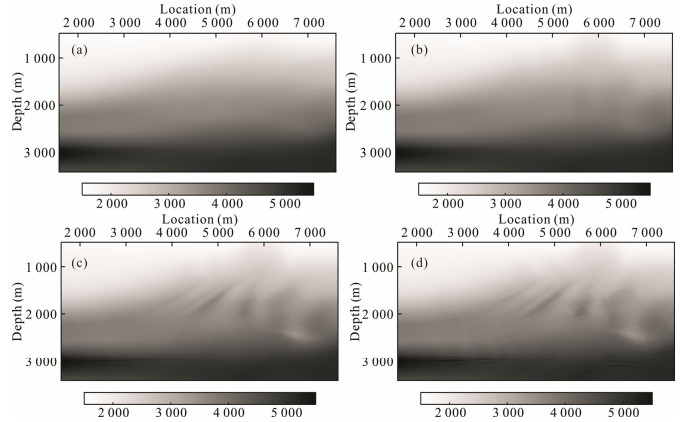
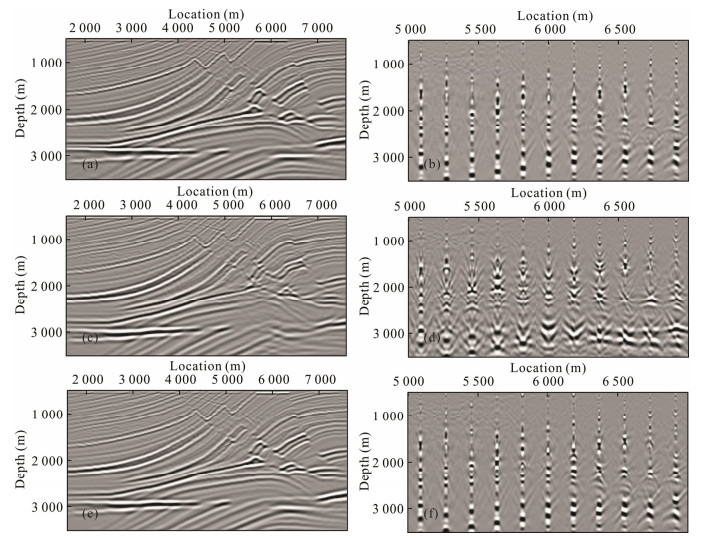
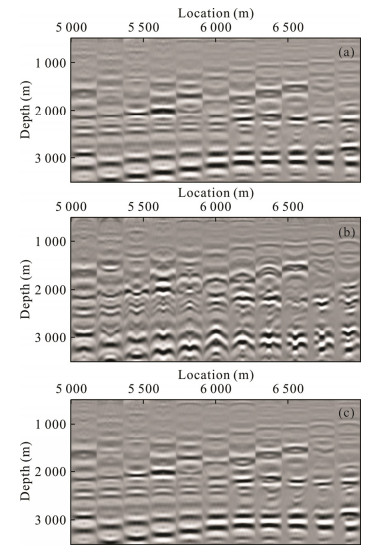
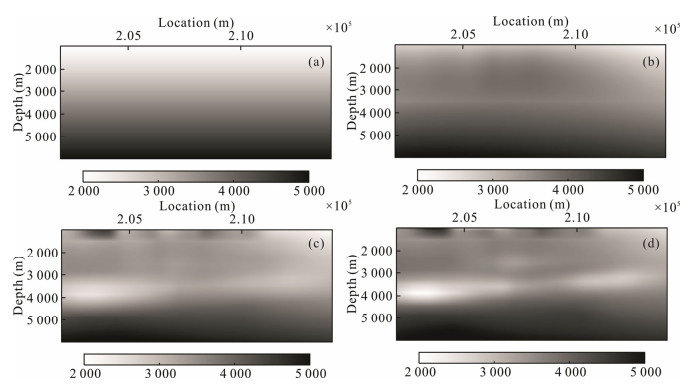
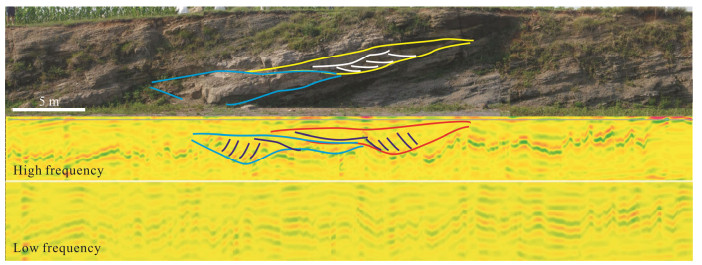
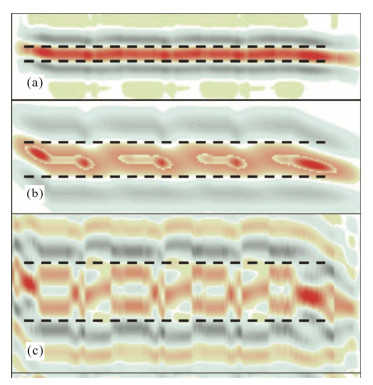
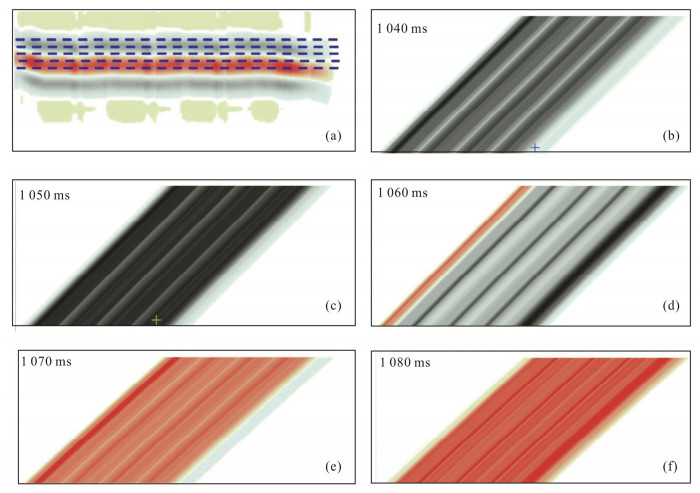
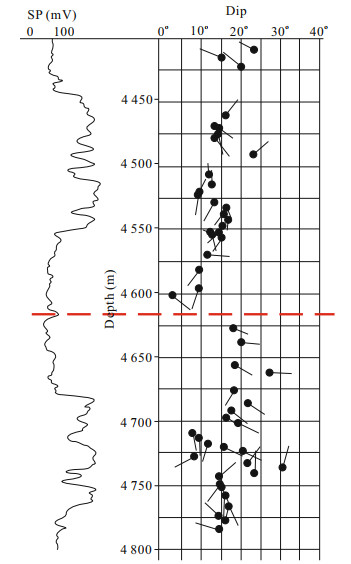
Reservoir architecture of meandering river deposition is complex and traditional seismic facies interpretation method cannot characterize it when layer thickness is under seismic vertical resolution. In this study, a seismic sedimentology interpretation method and workflow for point bar characterization is built. Firstly, the influences of seismic frequency and sandstone thickness on seismic reflection are analyzed by outcrop detection with ground penetrating radar (GPR) and seismic forward modeling. It is found that (1) sandstone thickness can influence seismic reflection of point bar architecture. With the increasing of sandstone thickness from 1/4 wavelength (λ) to λ/2, seismic reflection geometries various from ambiguous reflection, "V" type reflection to "X" type reflection; (2) seismic frequency can influence reservoirs' seismic reflection geometry. Seismic events follow inclined lateral aggradation surfaces, which is isochronic depositional boundaries, in high frequency seismic data while the events extend along lithologic surfaces, which are level, in low frequency data. Secondly, strata slice interpretation method for thin layer depositional characterization is discussed with seismic forward modeling. Lastly, a method and workflow based on the above study is built which includes seismic frequency analysis, 90º phasing, stratal slicing and integrated interpretation of slice and seismic profile. This method is used in real data study in Tiger shoal, the Gulf of Mexico. Two episodes of meandering fluvial deposition is recognized in the study layer. Sandstone of the lower unit, which is formed in low base level stage, distributes limited. Sandstone distribution dimension and channel sinuosity become larger in the upper layer, which is high base level deposition.